Intrinsic-specific concepts
This section introduces several new terms that are specific to the Intrinsic platform. To better visualize the different relationships and dependencies between terms, refer to the conceptual diagrams in this section.
Solution, deployment, and physical system
Finalized solutions, which in this context are automated robotic solutions, are deployed, or 'sent', to a physical system. The output of a deployment is therefore what is produced on the physical system. The solution is the entity which becomes an instance of a deployment. Because a physical system relies on a deployment to demonstrate the solution, deployment is therefore bound to it.
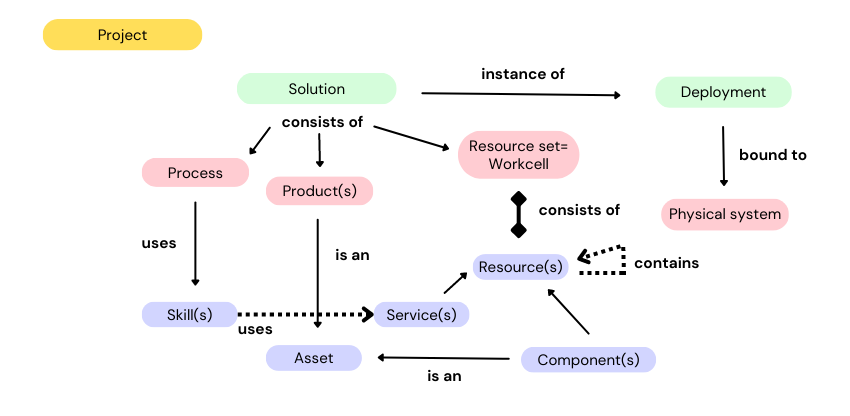
Process, product, and resource set
Begin, for example, by looking at an (automation) project. A project may consist of one or more solutions which solve a particular set of automation problems or tasks, such as automating an assembly task at your manufacturing site.
Typically, people from multiple roles need to collaborate to create a solution:
-
The product designer defines the product that needs to be manufactured which includes both the raw input materials as well as the final output. Additionally, they might describe intermediate material states (e.g., partial assemblies). A product definition typically refers to one or more assets that can be shared across projects. This may correspond to your BOM catalog.
-
The hardware engineer designs, and later builds, a workcell which typically consists of multiple resources, such as a robot arm, a gripper, and a camera. A resource consists of one or more software-defined services (such as a device driver or an object detection service) and hardware components. The hardware component comprises the 3D geometry, but also a simulation model, or a digital twin, describing how the hardware component behaves.
-
The process engineer defines the manufacturing process, or the sequence or program that brings the input materials into the expected output state. The Intrinsic platform uses behavior trees to describe the process, modelling both the control flow and parameterized skills. Skills are the basic building block of behavior trees. The process engineer can either make use of available skills, or author their own. Skills typically are stateless and talk to one or more services of resources.
A solution can be deployed, either to real hardware or in simulation. A deployed solution is also called a deployment.
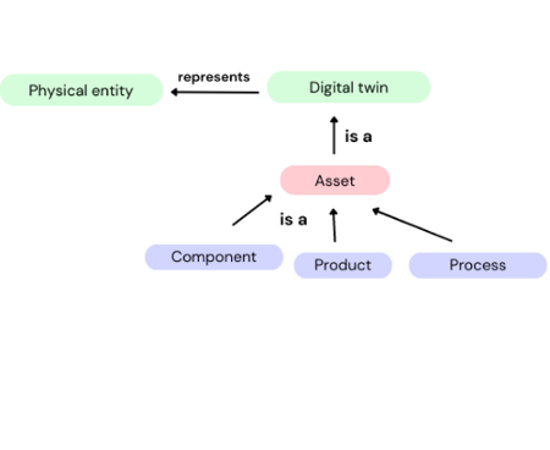
Instances
A basic building block in the Intrinsic stack is the concept of an asset. An asset essentially corresponds to the digital twin of a physical object. In the easiest case, an asset is just a static object (such as a work piece) that comes with visual 3D geometry and optionally, collision geometry and additional physics information (such as center of inertia or mass). More complex assets, such as a camera, ship with software services such as a camera device driver that lets you to configure and use the device. The camera asset may also come with additional information for how this device behaves in simulation (e.g., by simulating it).
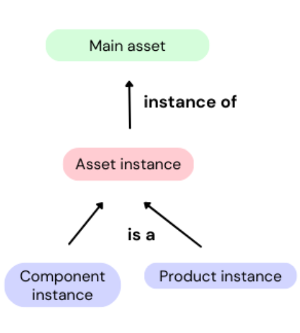
Intrinsic also distinguishes between main assets (e.g., the class of a particular device) and the asset instances (a particular camera mounted in a particular workcell with a specific MAC address or serial number).
As assets represent both components and product parts, Intrinsic also introduces component instances and product instances to refer to a particular instance of the main asset which may slightly deviate (e.g., with particular settings, parameters, or 3D geometry).
A skill implements a particular robot behavior, for example, to move the end-effector to a particular pose or to open or close the gripper. Skills typically have parameters, and a parameterized skill is therefore also a configured skill.