control_adaptive_pinch_gripper
Skill class for ai.intrinsic.control_adaptive_pinch_gripper skill.
The control_adaptive_pinch_gripper skill controls an adaptive pinch gripper through position, velocity and/or force.
To close the gripper, set its position to 0%, to open it, set its position to 100%.
Precondition to execute: the gripper resource has been enabled using the ai.intrinsic.enable_gripper skill.
Prerequisites
This skill does not have any prerequisite.
Usage Example
This skill is used to open and close an adaptive pinch gripper, through position, velocity and/or force. The gripper is expected to be controlled by a PinchGripperServer service.
The following image shows an example instance of the control_adaptive_pinch_gripper skill that closes the gripper (position 0) with 50% of the maximum speed and 80% of maximum force(effort).
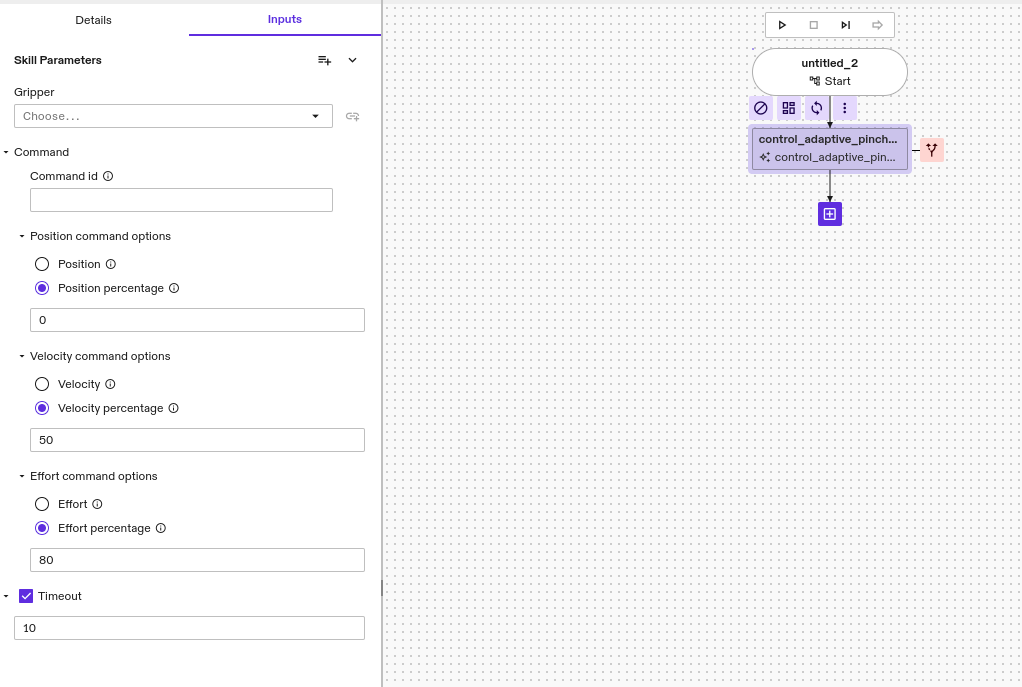
After sending the command to the service, the skill waits for confirmation from the service. The timeout specifies the timeout in seconds to wait for the confirmation.
Parameters
command
The command to send to the gripper.
timeout
Optional timeout in seconds to wait for a return status from the gripper. Default to 10 seconds.
Capabilities
gripper
Resource with capability intrinsic_proto.gripper.PinchGripperServer
Error Code
The skill does not have error codes yet