suction_gripping_indicated
Skill class for ai.intrinsic.suction_gripping_indicated skill.
Checks and returns gripping indicated signal for suction grippers. An error is raised if the current status does not match the expected status.
Prerequisites
This skill does not have any prerequisite.
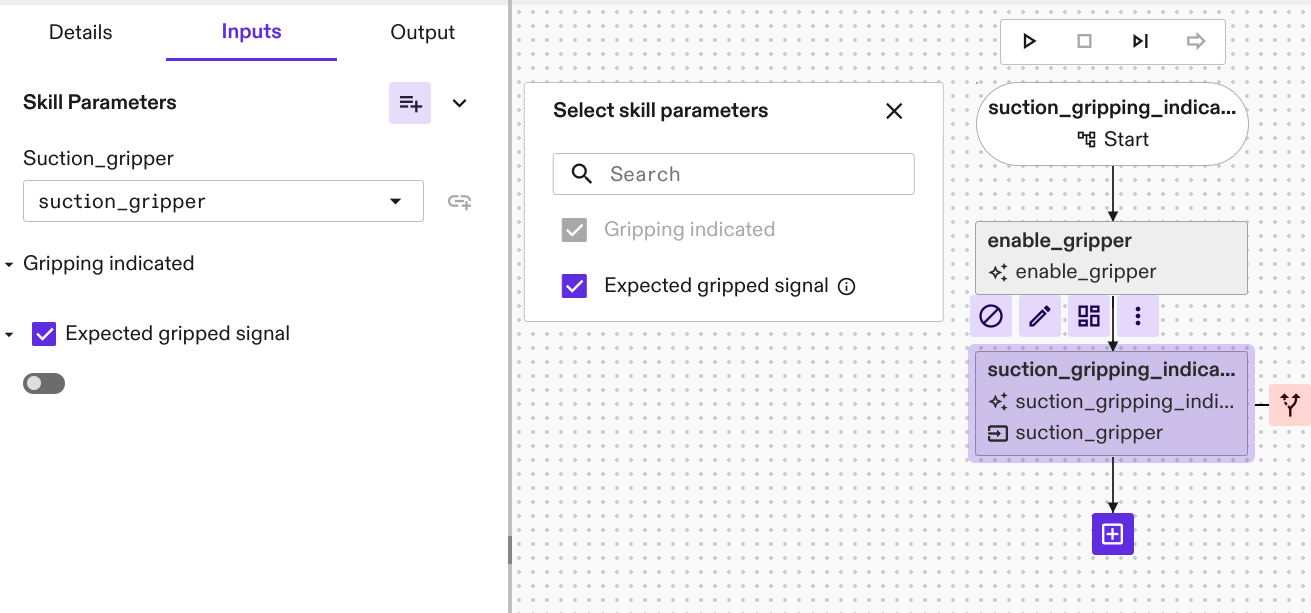
Usage Example
This skill is used to determine if an object is gripped by the suction gripper.The following example shows an instance of the suction_gripping_indicated skillthat has the expected gripping status set as false.
Parameters
gripping_indicated
Requests gripping status.
expected_gripped_signal
Exit with failure if gripping_indicated signal doesn't match expected value.
Capabilities
suction_gripper
Resource with capability intrinsic_proto.eoat.SuctionGripper
Returns
gripped
Response of gripping_indicated signal.
Error Code
The skill does not have error codes yet